Implementation

Gripper Demo Video:
Gripper Demo
Components Used
- Mobile Base: TurtleBot platform equipped with a Raspberry Pi.
- Perception: RealSense Camera for depth and ArUco marker detection.
- The Arm: A custom 4-DOF robotic arm.
- Servos: Four MG995 high-torque revolute servos for the base, shoulder, and elbow joints, plus one micro-servo for the gripper.
- Materials: Basswood links for arm structure and foam padding on the gripper to prevent slippage.
- Electronics:
- Arduino: Used to control the five servos.
- Battery Pack: Dedicated power supply for the high-torque servos.
- Containers: An onboard basket (paper cup) for storing retrieved cubes.
Prototype Parts
- Prototype: Cardboard, Basswood
- Gripper design modified from:
https://www.instructables.com/
Robotic-Gripper-1
Software Implementation
Our software stack is built on ROS2 coordinating perception, navigation, and control.
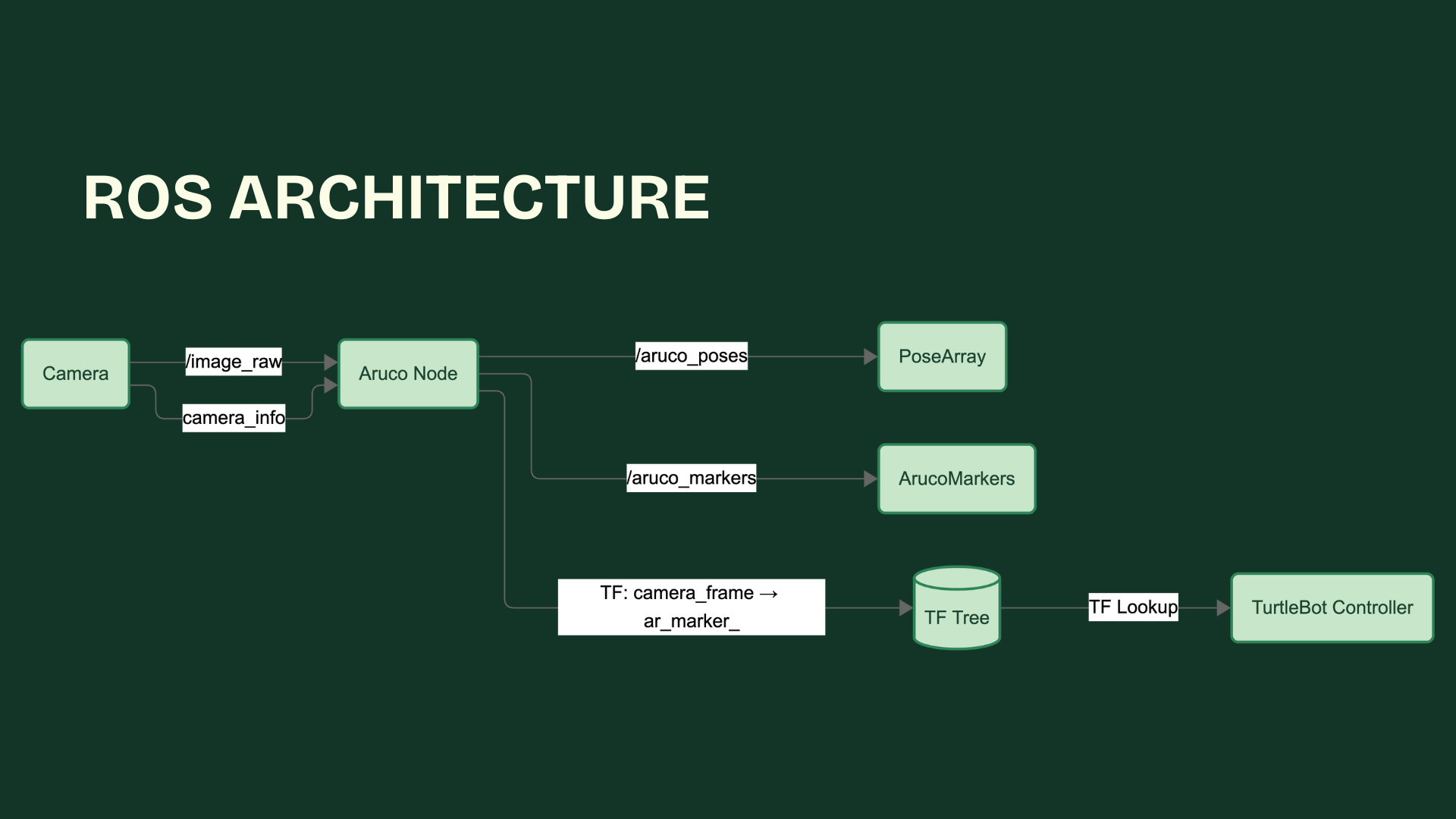
1. ROS Architecture
High-level control is managed by a central TurtleBot Controller node that interfaces with several sub-systems:
- Vision Node: Processes
image_rawandcamera_infofrom the RealSense camera using the Aruco Node to output aPoseArrayandArucoMarkers. - TF Tree: Dynamically calculates the transform from the
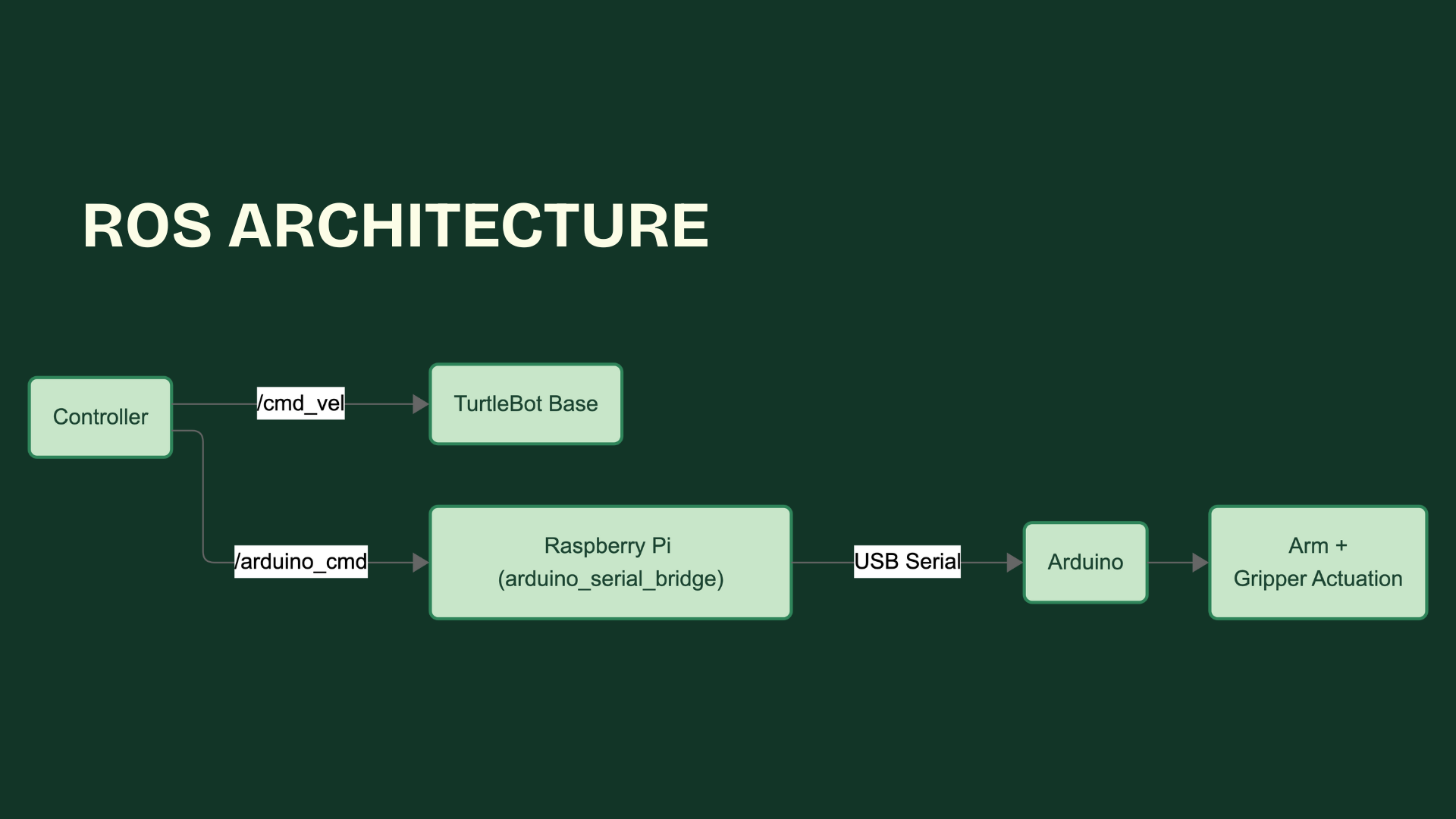
camera_frameto thear_marker_. - Serial Bridge: A dedicated
arduino_serial_bridgerunning on the Raspberry Pi sends movement commands via USB Serial to the Arduino.
2. Motion Planning & Control
- Navigation: The controller uses TF Lookups to compute the distance to the target ArUco tag. It publishes to the
/cmd_veltopic to drive the TurtleBot until the “stop distance” is reached. - Arm Sequences: The arm operates via pre-defined sequences triggered manually by wired connection from laptop to arduino.
Complete System
The system follows a sequential state machine to complete a Search and Retrieve mission:
- Target Detection: The robot identifies an ArUco Tag place next to a cube.
- Approach: The controller computes the transform to the tag and navigates the TurtleBot to the precise stop distance.
- Grasping Sequence:
- The arm moves to a start pose.
- The gripper opens to 140° and then closes to 180° to secure the block.
- The arm lifts the block
- Deposit: The base or arm rotates to align with the onboard cup and the gripper releases the block.
- Return/Next Task: The robot either returns to the start location or computes the distance to a second tag for a follow-up courier task.