EECS 106A Final Project Report
View Final Project Source Code
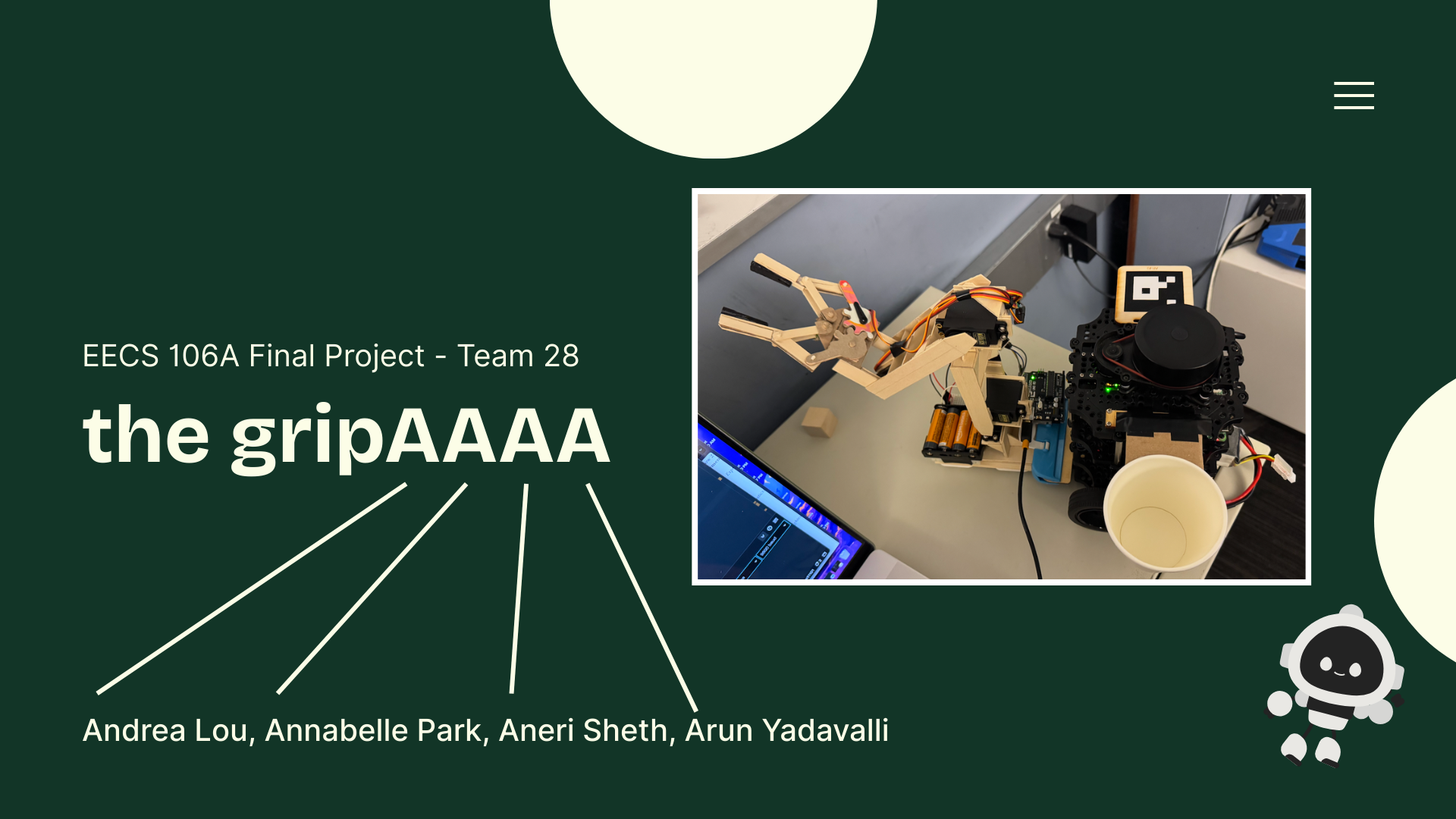
Autonomous TurtleBot system for detecting, navigating to, and collecting wooden cubes using ArUco-based perception and a custom 4-DOF gripper.
Overview
This project presents an end-to-end mobile manipulation system in which a TurtleBot autonomously detects wooden cubes in its environment, plans and executes navigation toward them, and performs pickup and drop-off using a custom-built gripper.
System Pipeline
- Perception: RealSense RGB camera + ArUco tags for robust cube localization
- Planning & Control: TF-based navigation to a tuned stopping distance
- Actuation: Arduino-controlled 4-DOF gripper for grasping and deposit
Results
- Reliable detection and pose estimation of cubes
- Approach and stop by cube detected via ArUco tags
- Successful pickup and placement into onboard basket
Team
Andrea • Annabelle • Aneri • Arun
📄 Use the navigation bar above to explore our system design, implementation details, and conclusions.